
Objectives
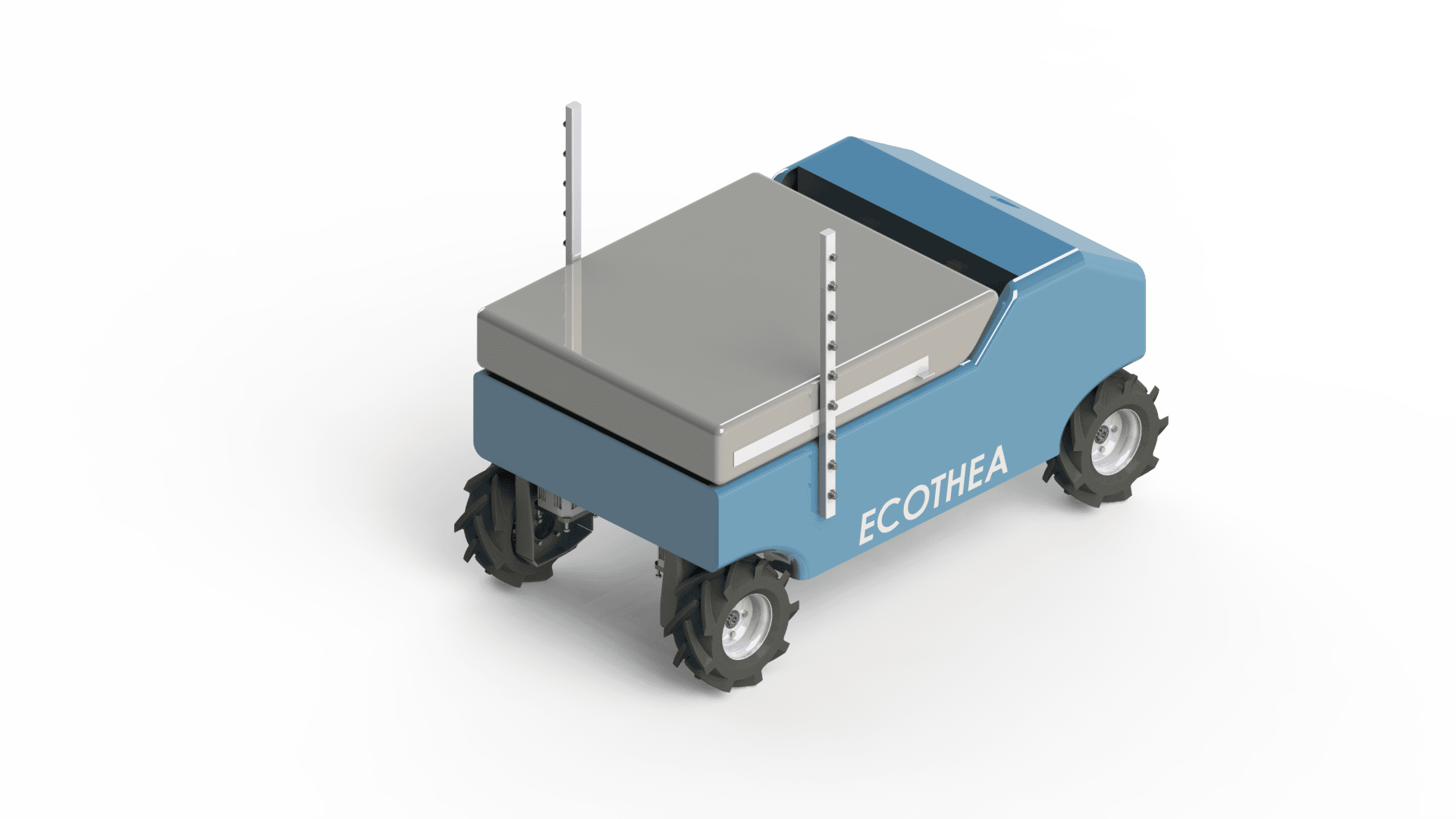
Smilla H2 is an autonomous multifunctional agricultural rover developed by Ecothea. The project has been developed in strong partnership with the “Innovative Vehicles and Systems Desing and Testing” research group of the Department of Mechanical Engineering of Politecnico di Torino, which has been involved for years in the development of innovative solutions for off-road agri-construction vehicles.
Main goal of the project is the creation of a new generation of vehicles for agricultural applications based on the idea of modularity. Indeed, the tasks followed by Ecothea aim to the design and construction of modular agricultural vehicles in order to make them multi-functional: from precision farming practises in vineyards and orchards using machine-based sensors to the transport of loads. Furthermore, they are capable of executing light farming operations, since the possibility of installing an implement attaching point, or spraying operations using an integrated tank.
The reasons that lie behind the project are several and covers a wide range of aspects related to anthropic activities: environmental and economical sustainability, improve farmers working conditions both in terms of safety and comfort, enhance efficiency and productivity of farming practices.
The developed solution belongs to the category of multi-functional agricultural robots. Indeed, the rover was designed as a modular platform in order to perform several tasks such as monitoring crop field status, transport of loads (up to 400 kg), UAV platform or executing some traditional agricultural operations like spraying.
From a technical point of view, the vehicle features an electric powertrain with a Fuel Cell (hydrogen powered) range extender unit, whose role is to increase the autonomy, and thus productivity, without implementing an excessively bulky energy storage system. Autonomous driving is based on GPS-RTK technology which guarantees a centimetric level of accuracy. The in-house developed control logic and sensors network ensures that the vehicle is able to manage itself during operations.
The rover technical solutions
The rover belongs to small size agricultural vehicles, and it is equipped with a four-differential wheel-drive system. The vehicle primary elements are the chassis, the powertrain, the energy storage systems, the on-board sensors and the control units. All these elements were designed considering the vehicle requirements in terms of weight, endurance, expected lifetime and peak power requirements.
The powertrain adopts four independent electric traction motors, each one connected to one wheel by means of a mechanical coupling.
As for the on-board energy storage system, it features two different elements: the battery pack and the metal hydride canister for storing hydrogen. The battery pack adopts Li-ion cells, has a rated voltage of 48 V and is able to stock 2 kWh of electrical energy. As for the hydrogen storage, the adoption of a metal hydride tank was chosen due to its safety and easy implementation. Considering the equipped hydrogen tank, and the fuel cell system efficiency, the range extender unit is able to produce 1.5 kWh at rated power.
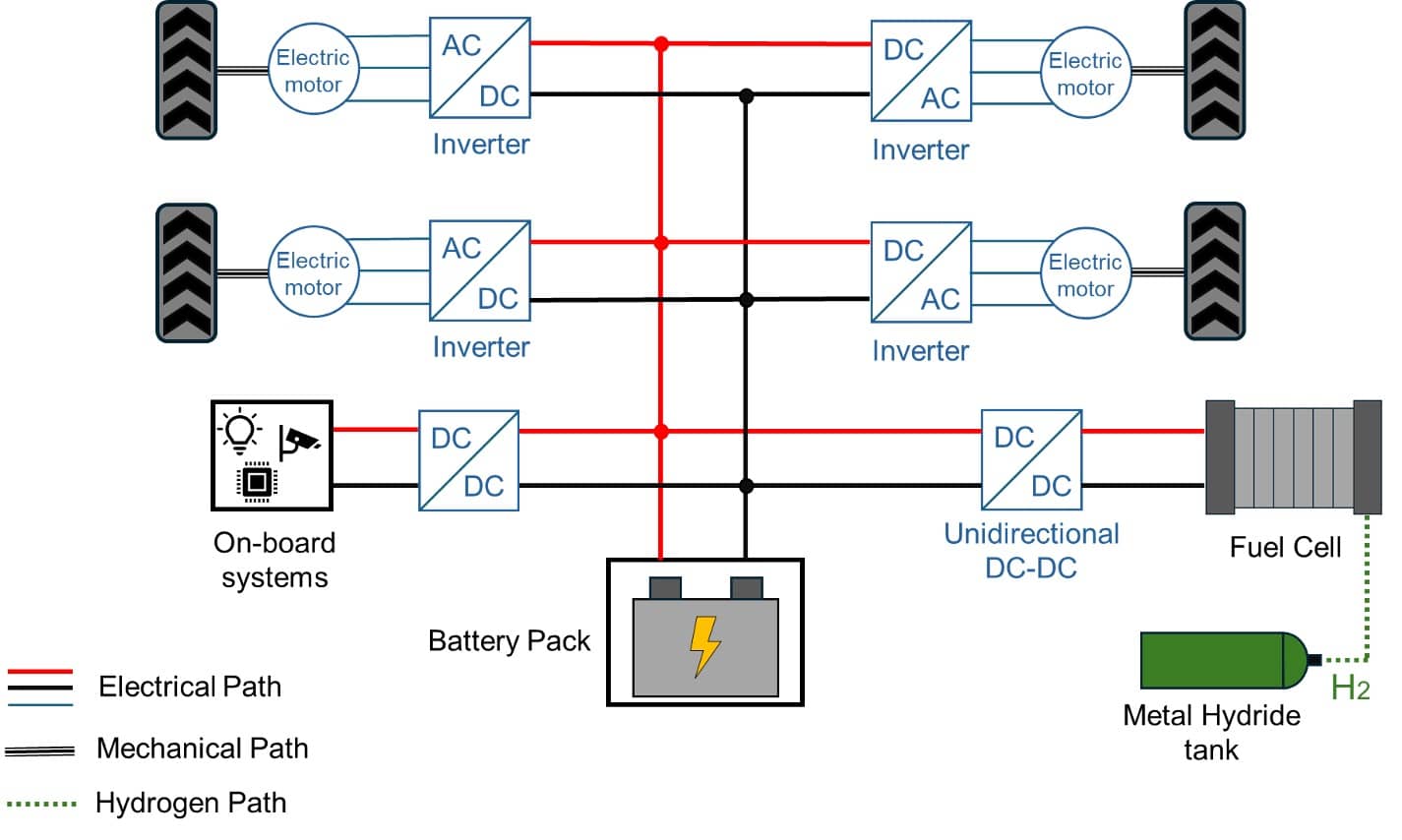
Schematic layout of the rover architecture
The control logic system is the mean through which the vehicle can operate autonomously. It consists of several sensors and electronic devices which operate together in order to perform a predetermined mission. The used devices can be subdivided in different categories:
- Locating Sensors: they allow the vehicle to move and to orientate itself within the operative environment map. GPS-RTK positioning system.
- Safety Sensors: they allow the rover to take decisions in case of possible dangerous situations for the rover itself or for anything that surrounds it. Obstacle avoidance sensors (LiDAR) and emergency stop sensors (ultrasonic sensors) belongs to this category.
- Vehicle Control Unit: it gives commands to the power electronics on the basis on all the information received by the other sensors.
An on-board computer is installed on the vehicle in order to manage the data flow improving control logic reliability. The vehicle is equipped with industry 4.0 system. This implies the possibility to remotely monitor the performance of the rover. Furthermore, the data linked with the performance of the vehicle during operation are saved and available in cloud on a dedicate server. All these devices can communicate among each other thanks to the CANbus network implemented within the rover.
The range extender unit adopts a Proton Exchange Membrane Fuel Cell (PEMFC) to produce electricity using hydrogen and oxygen from the air. Fuel cell systems based on PEM technology are of particular interest for vehicular applications due to their low operating temperatures, compactness, durability and high efficiency. The adoption of range extender unit is able to increase the autonomy of Smilla H2 of 80%. Furthermore, since a metal hydride tank requires short time to be refilled, a tank swap technique can be used to avoid stop time of the rover. Finally, since the only by-product of the reaction inside the fuel cell is water, the system emits zero local emissions.
Range extender features
Furthermore, the adoption of hydrogen as fuel introduces the concept of circular economy and sustainability for farming activities. Indeed, hydrogen can be produced from water using an electrolyser powered with electricity. Therefore, implementing an electrolyser unit connected to a photovoltaic system, a farm will be able to produce autonomously hydrogen with almost zero associated emissions and, excluding the initial investment, also zero associated costs.
Patents Filed
- UNMANNED AGRICULTURAL ROVER HAVING A FUEL CELL DRIVE
An Italian patent application has been filed for Smilla H2 system.
The scope of the present invention is to provide a new tool to be used in agricultural tasks on field and it is achieved by an unmanned rover.
Contact us for more information




{kind=link}
{kind=link}
{kind=link}
{kind=link}