
Obiettivi
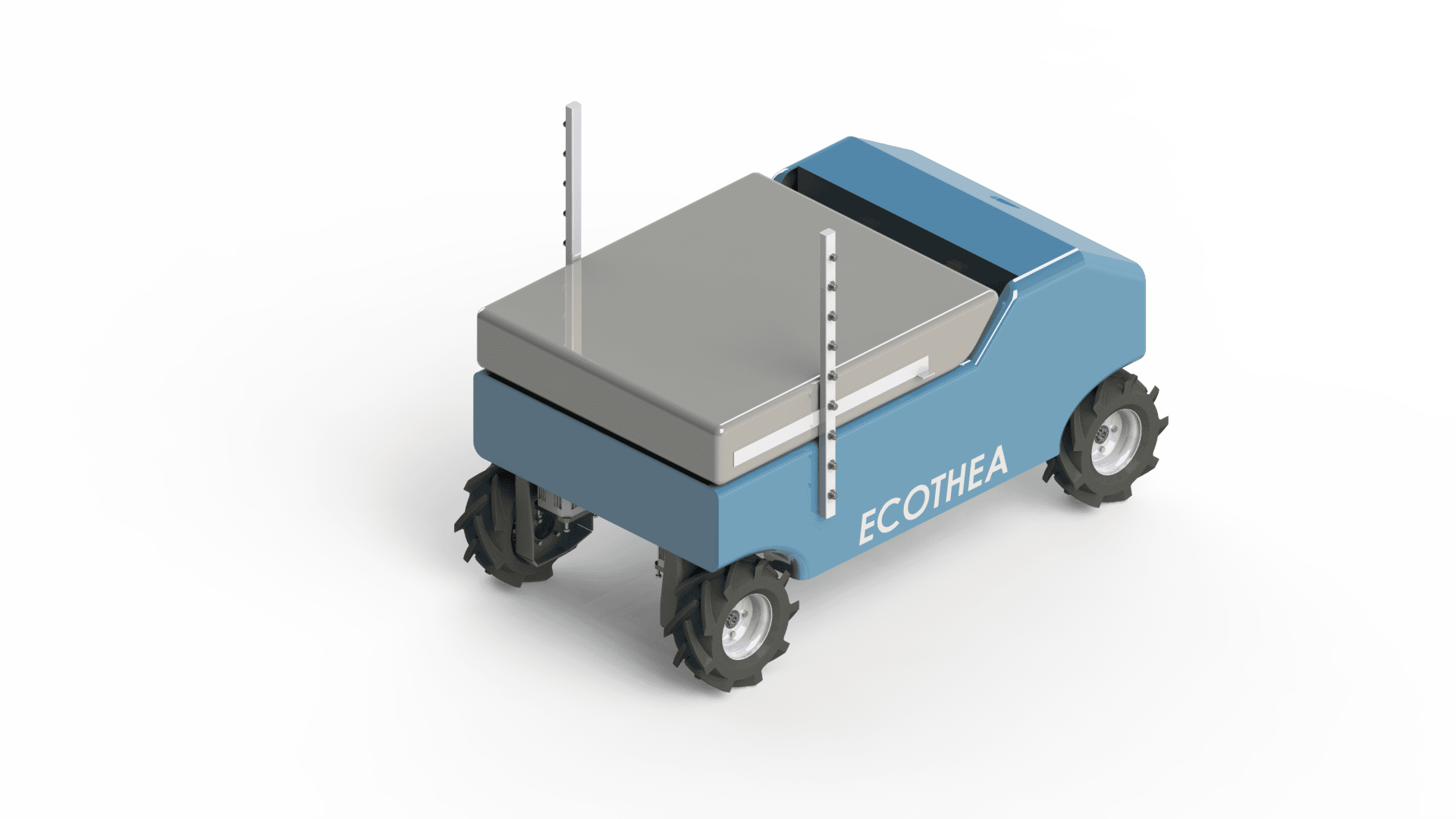
Rover a guida autonoma multifunzione sviluppato da Ecothea per applicazioni da vigneto/frutteto. Il progetto è stato realizzato in stretta collaborazione con il gruppo di ricerca del Dipartimento di Ingegneria Meccanica del Politecnico di Torino “Progettazione e testing di veicoli e sistemi innovativi”, il quale da anni è impegnato nello sviluppo di soluzioni innovative per veicoli da lavoro off-road.
L’obiettivo principale del progetto consiste nella creazione di una nuova generazione di veicoli per applicazioni agricole basate sul concetto di modularità. Infatti, gli obiettivi perseguiti da Ecothea mirano alla progettazione e realizzazione di “piattaforme modulari” in maniera tale da garantirne la multifunzionalità: da attività legate al precision farming attraverso una fitta rete di sensori fino al trasporto carichi. Inoltre, questi veicoli sono in grado di eseguire delle lavorazioni leggere in campo, grazie alla possibilità di installare un attacco a tre punti, oppure di irrorare vigneti/frutteti tramite un serbatoio integrato sul veicolo stesso.
Diverse ragioni sono alla base del progetto Smilla H2 e riguardano numerosi aspetti relativi alle attività antropiche: sostenibilità economica ed ambientale, migliorare la qualità delle condizioni di lavoro degli agricoltori sia in termini di sicurezza che di comfort, aumentare l’efficienza e la produttività delle operazioni in agricoltura. La soluzione progettata rientra nella categoria dei robot agricoli multifunzionali. Infatti, il rover agricolo è stato concepito come piattaforma modulare in maniera tale che con un singolo prodotto si possano eseguire diverse operazioni: dal monitoraggio dello stato di salute e qualità delle piante, al trasporto di carichi (fino a 400 kg), fino alla possibilità di essere una piattaforma per droni UAV o di eseguire delle lavorazioni tradizionali come l’irroramento.
Da un punto di vista tecnico, il veicolo è dotato di una powertrain elettrica con l’aggiunta di una Fuel cell come range extender, alimentata ad idrogeno, il cui ruolo è quello di aumentare l’autonomia del veicolo, quindi la produttività, senza installare sistemi di accumulo dell’energia troppo ingombranti e dal peso eccessivo. Il sistema di guida autonoma sfrutta la tecnologia basata su sistemi GPS-RTK, i quali sono in grado di garantire un livello di precisione centimetrico sulla posizione. La rete di sensori e la logica di controllo, interamente sviluppata in casa, assicurano la completa auto-gestione del veicolo durante lo svolgimento delle sue mansioni.
Soluzioni tecniche del rover
Il rover rientra nella categoria dei veicoli agricoli di piccola taglia ed è equipaggiato con un sistema di trazione a 4 ruote differenziali. Gli elementi principali nei quali è possibile suddividere il veicolo sono: il telaio, la trasmissione, il sistema di accumulo dell’energia e l’elettronica di bordo. Tutti questi elementi sono stati progettati tenendo conto di tutti i target di progetto in termini di peso, autonomia, durata e potenza necessaria.
La trasmissione è costituita da 4 motori elettrici indipendenti tra di loro, ciascuno dei quali è direttamente connesso su ciascuna ruota del rover per mezzo di un riduttore meccanico. Il sistema di accumulo dell’energia è costituito da due elementi: il pacco batterie e il tank ad idruri metallici per l’immagazzinamento dell’idrogeno. In particolare, il pacco batterie adotta celle agli ioni di litio, ha una tensione nominale di 48 V ed è in grado di contenere fino a 2 kWh di energia. Per quanto riguarda l’idrogeno, è stato scelto un innovativo serbatoio a idruri metallici, il quale, a differenza dei tradizionali sistemi di stoccaggio dell’idrogeno, è migliore in termini di facilità di installazione e sicurezza. La quantità di idrogeno contenuta nel tank consente al veicolo di aumentare l’energia contenibile a bordo di circa 1.5 kWh.
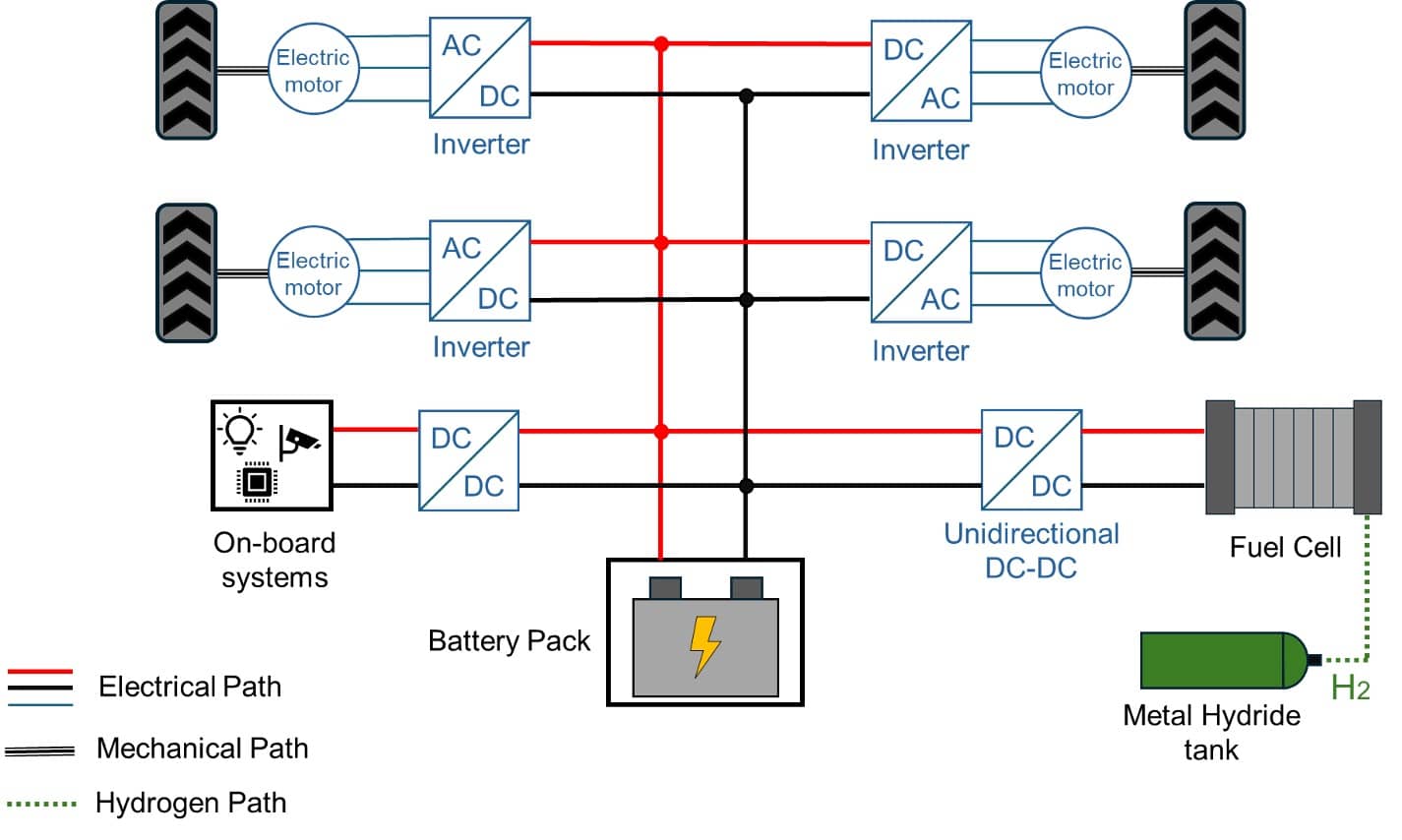
Architettura schematica del rover
La logica di controllo è il mezzo attraverso il quale il veicolo riesce a lavorare autonomamente. Esso è costituito da una serie di sensori e dispositivi elettronici che, operando simultaneamente, sono in grado di compiere i task prestabiliti. I dispositivi utilizzati possono essere suddivisi in una serie di categorie:
- Sensori di posizione: consentono al veicolo di spostarsi e orientarsi all’interno dell’ambiente operativo; esempi di questi sensori sono il sistema GPS-RTK.
- Sensori di sicurezza: consentono al rover di prendere decisioni in caso di pericolo sia per il rover stesso che per qualsiasi cosa lo circondi; esempi di questi di sensori sono quelli necessari per evitare ostacoli imprevisti (LiDAR, ultrasuoni) o sensori di stop di emergenza.
- Vehicle Control Unit: è l’elemento che fornisce gli input di comando al veicolo, sulla base delle informazioni provenienti da tutti i sistemi e sensori presenti a bordo.
Per aumentare l’affidabilità del sistema e garantire un corretto e sicuro funzionamento della logica di controllo, a bordo del veicolo è installato un piccolo computer per poter gestire tutto il flusso dati in maniera adeguata. Inoltre, il veicolo è dotato di sistemi industria 4.0. Tutte le informazioni relative alle performance del rover possono essere salvate in cloud su server dedicati e consultate quando necessario. La comunicazione tra i diversi devices presenti sul rover è possibile grazie ad una rete CANbus implementata al suo interno.
L’unità range extender adotta una fuel cell con membrana a scambio protonico (PEMFC), la quale è in grado di produrre elettricità usando idrogeno e ossigeno (quest’ultimo presente in atmosfera). Le PEMFC sono molto interessanti per applicazioni di questo tipo dal momento che presentano basse temperature operative, compattezza dimensionale, alta efficienza e durabilità nel tempo. Nel caso di Smilla H2, grazie alla presenza della fuel cell, l’autonomia può essere incrementata fino all’80%. Inoltre, il serbatoio utilizzato per stoccare l’idrogeno richiede brevi tempi di ricarica, e date le dimensioni ridotte di quest’ultimo sarebbe possibile anche effettuare la sostituzione rapida del serbatoio (tank swap). Inoltre, dal momento che l’unico prodotto in uscita dalla fuel cell è acqua, il sistema è localmente a emissioni zero.
Caratteristiche range extender a fuel cell alimentata ad idrogeno
La propulsione ad idrogeno è importanti anche da un punto di vista in termini di economia circolare. Infatti, l’idrogeno può essere prodotto “in casa” a partire da acqua, per mezzo di un elettrolizzatore alimentato elettricamente. Pertanto, ad esempio, usando un elettrolizzatore alimentato con l’energia elettrica proveniente da pannelli solari installati nella farm, sarebbe possibile produrre autonomamente idrogeno a circa zero emissioni ed, escludendo l’investimento iniziale, con zero costi relativi.
Brevetti Depositati
- UNMANNED AGRICULTURAL ROVER HAVING A FUEL CELL DRIVE
Per il sistema Smilla H2 è stata depositata una richiesta di brevetto
Lo scopo dell’invenzione è quello di fornire un nuovo strumento per l’esecuzione di attività agricole basato su sistemi autonomi e senza pilota.
Contattaci per maggiori informazioni




{kind=link}
{kind=link}
{kind=link}
{kind=link}